Японские инженеры создали робота, движениями которого управляет тутовый шелкопряд, стремящийся к источнику феромонов. Описание эксперимента опубликовано в журнале Bioinspiration and Biomimetics, а его краткое содержание можно прочитать в пресс-релизе Института физики IOP.
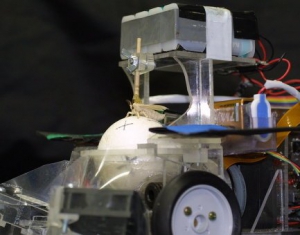
Шелкопряд в устройстве был закреплен над шариком для пинг-понга. Двигая лапками, насекомое вращало этот шарик, а положение последнего отслеживалось и управляло перемещением двухколесного робота. Такая система управления напоминает устройства ввода с трекболом.
Шелкопряд в своей роботизированной «оболочке» помещался на площадку, где находился точечный источник с феромонами. Чтобы сымитировать поток воздуха, который насекомое встречает в полете, к одной из сторон площадки были прикреплены вентиляторы. Пытаясь добраться до источника феромонов, «робонасекомое» исполняло характерный брачный танец, двигаясь к нему то по прямой, то зигзагами - точно так же ведет себя обычный шелкопряд, приближаясь к самке.
Авторы статьи полагают, что подобные устройства могут не только применяться для изучения физиологии мозга насекомых, но и для создания роботов, чувствительных к определенным запахам. Обоняние насекомых работает гораздо быстрее современных электрохимических сенсоров, что немаловажно при движении и ориентировании.
Ранее инженеры-робототехники уже не раз обращались к насекомым. Так, исследователи из Калифорнийского университета создали жуков-киборгов, движениями которых можно управлять дистанционно при помощи специального вживленного микрочипа.
lenta.ru
- Дата публикации: 06.02.2013
- 1080

